This was the third flight of the “Pi In The Sky” board, but the first flight of the new open-source software written specifically for it (previous flights used a modified version of my usual Pi tracker software). The new software is a single multi-threaded program (instead of a collection of separate programs) and is configured via a text file so that for most users no recompilation is needed.
For this flight I used a foam polystyrene egg bought from HobbyCraft. The Pi and tracker board fit neatly inside one half:

whilst the camera, GPS antenna and battery pack fit inside the other. No other packing was needed and the 2 halves were glued together with UHU Por polystyrene adhesive. Here’s the result:

The glue is strong, but just to make sure I put some tape around the egg to keep the halves together. Here’s the resulting payload, as I start to inflate the balloon:

The launch was easy, and we watched for a while as the flight broke through the clouds and started to download some nice images, after which we set out to chase. We were expecting the flight to land east of Ludlow, and we initially stopped near Leominster till the balloon turned west, then nearer Tenbury Wells as we waited for the burst. That happened at 31644 metres, nearly 2km above the calculated figure, and pretty good for a 500g balloon. Here’s the full flight path:
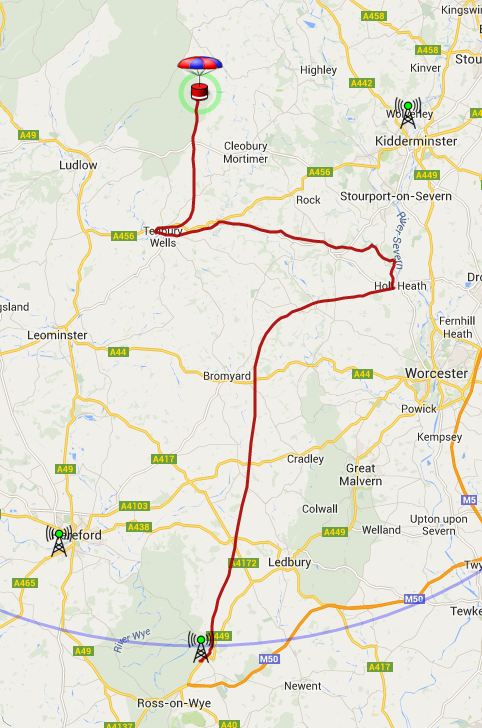
We were about 3 miles away when it landed, which isn’t bad considering the narrow winding roads in the area. Landing spot was 4.5 miles from the prediction which is also pretty good. Once it landed we headed for the last position, and when about half a mile away we received a signal strong enough to decode. We then had the final position which was near a farmhouse:

We parked up and spoke to a farm worker and then the farmer who was very helpful, allowing us to wander round trying to find the payload. Initially we went to the wrong place, having transcribed the co-ordinates wrongly! So we went back to the car, got the correct position, and checked the view from the payload’s camera which the farmer recognized:

Once we had that information it only took a couple of minutes to locate the flight, which was on the ground with the line going over a bush.
So, a successful first flight for the new software and third flight for the new board. There’ll be another test flight soon, hopefully next weekend. Meanwhile, some photos from the flight:


What a clever and simple idea for a case! 🙂
Did you check with local air traffic control before releasing the balloon?
As always, permission was obtained from the CAA who issue a NOTAM to cover the flight.
Hi Dave,
We are in final stages of preparation for a launch. Was wondering if you run the flight predictor at launch and then just chase the landing site or run re-calibrations every now and then basis telemetry data ( ascent/descent rate, altitude, lat/long etc. ) to predict a more accurate landing site.
Thanks in advance,
Rajnish
The live map (www.spacenear.us) has a live predictor, which works well enough especially after burst.
It’s best not to go straight to the expected landing site. Get somewhere close, on a main road (preferably near a main junction) and wait for the burst before going further.
Hi Dave,
If I wanted to use the Pi Camera Module to observe stars or a meteor shower – does it have the low-light level capabilities to differentiate and make out stars in the sky? Assuming I were to angle it at about 20 degrees above the horizon instead of back down at Earth. Thanks!
I’ve no idea really. You might have a chance with the Pi Noir camera because that is much more sensitive.