This was a pretty successful flight though it didn’t quite go to plan!
It was a joint project with Anthony Stirk who has written it up here. The aim was to drop a paper plane over the North Sea, with that landing in Holland whilst the main payload continued on. Originally we were going to drop a second plane later on in the flight, but decided against that. The main payload (the one doing the dropping) was a Raspberry Pi with a Pi Camera, running via a switching regulator from 6 Lithium AA cells. It also had a small MOSFET board driving 3 resistive cutdowns – one for the first pane, one for the absent second plane, and one to drop the Pi itself to descend under a parachute. The Pi was programmed to trigger the cutdowns at longitudes of 4, 15 and 20, with the aim of having all 3 payloads landing inside our tracker network and thus potentially recoverable. The cutdown procedure started by switching the camera to video mode, then sending approx 8W into the cutdown resistor for a period of 8 seconds.
The day started with Anthony cutting and folding his paper planes from a sheet of thick A2 paper in the statutory Fuchsia Pink. It was a neat design incorporating a little cockpit for the radio tracker:

Meanwhile we figured out a way of mounting it on the main payload so it wouldn’t snag, then I set about putting that payload together.
At the launch site, there was initially very little wind, but as soon as I needed to measure the neck lift the wind picked up and didn’t let go until after the launch! It took what seemed like ages to get any sort of accurate neck lift measurement, and that was a bit over target but not enough to prevent the balloon from floating. At this time of year, and particularly with the current winds, it’s nigh on impossible to have a HAB flight launch from and land in the UK, so a better option is to go for a “floater” where the balloon runs out of lift somewhere between 30 and 40km altitude, instead of going up till it bursts. For the size and make of balloon we were using (a 1600g Hwoyee), if you aim for an ascent rate of 4m/s or less then it’s going to float instead of burst. We aimed for 2m/s to make sure! Here’s the wind shortly before launch:

We had to be patient, but eventually the wind dropped enough for a fairly straightforward launch. Back at the car I wasn’t getting any reception from CLOUDY (the main payload) but that was because I hadn’t got an aerial plugged into my receiver! Anthony’s SNOW (the plane) was working fine but his experimental backup tracker (WANNAB1), which was hanging just below the balloon, wasn’t being received. He suspects a shorted aerial.
The flight path followed the prediction very closely, heading north-east before turning east over Bury St Edmunds. The ascent rate was pretty close to target too, just a bit over because of the overfill. We then helped Leo Bodnar with his 2 launches, before returning to my house to watch progress.
Images from the Pi were reasonable, but because of the side-mounted plane the camera was pointing downward, meaning that none of the shots quite showed the horizon. Also, because of the late launch, it hit sunset earlier than planned. Nevertheless it returned some decent images including this one (fixed by Steve Smith G0TDJ for some missing packets)

CLOUDY was programmed to drop SNOW over the North Sea, at a longitude of 4.0, and we watched with tense anticipation as that longitude was reached. To our great relief we soon saw SNOW descending, and it soon became clear that it was actually flying – the descent rate was near that expected for a parachute, and the GPS positions showed that it was repeatedly stalling and then flying again. Here’s the flight path showing the separation over the North Sea:


and, thanks to Anthony, some Google Earth paths for the separation:


The acceleration and deceleration of SNOW are clear to see on that second image.
Meanwhile, CLOUDY continued onward and upwards. With the paper plane gone, the camera had a more horizontal view and by chance was pointing towards the setting sun, taking some great shots including this was with Venus clearly visible:

CLOUDY then achieved the desired float, at about 34km:

By then it was in the expected very strong winds, reaching speeds of up to 330kph (205mph), so it soon crossed the Netherlands and into Germany, touching the Czech Republic before entering Poland. By then it was further south than expected and heading South East instead of East, so we had fewer listeners in range than we’d hoped, but still coverage was pretty good.
The second cutdown triggered at longitude of 15, as programmed, though of course there was no second plane to drop. However this is where things went wrong – the cold batteries couldn’t supply the cutdown current, and the Pi reset. Of course when it restarted, and regained GPS lock, the cutdown program hit the cutdown again (actually the first cutdown), and it rebooted again. At this point I knew the flight was doomed to a cycle of rebooting, so after a while of watching it do just that I switched off the PC to watch the telly.
It might have been a clue when Mission Impossible came on. Once I got bored with that, I decided to quickly check the live map before retiring to bed, and was rather surprised to see that CLOUDY had managed to get past the boot-cutdown-reboot cycle. That cycle includes up to 3 cutdowns each time (2 for the planes and one for the Pi itself), and as the Pi was still floating it was clear that the final cutdown hadn’t managed to sever the line holding the Pi up. So although I was very pleased it had got so far, I knew that it wasn’t going to come down anytime soon and that the batteries (which would only last 20 hours even without the battering from the repeated cutdown cycles) would die soon. Which they did, with Pi approaching Kirovohrad in Ukraine:
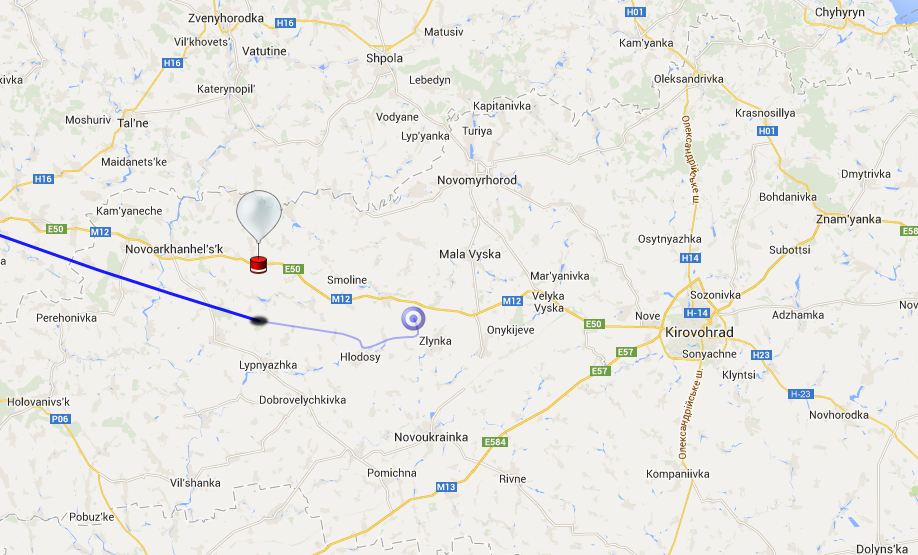
Most likely the flight continued at least till sunrise, and probably burst soon after that, landing in or near the Caspian Sea.
So, an interesting flight, with some things learnt and things to do (some tests on very cold batteries and high currents, and a more reliable cutdown system for such flights).
Thanks go to Anthony of course, Leo Bodnar for helping out, Phil Heron for providing the SSDV software, the CUSF guys for the tracker, Steve for the edited SSDV image, and everyone who tracked the flights for us.
Footnote: CLOUDY was named after our cat Cloudy who has been missing for 6 weeks. It seems unlikely now that we’ll see him again, but a flicker of hope remains.

Well done guys and thanks for giving us some wonderful *alternative* festive entertainment.
Hope the 2 Cloudys are safe & well somewhere & that they’ll come back home sooner or later.
Will have to try a French “Pi au Ciel” one of these days! It’s very tempting ;o)
Enjoy New Years’.
à+,
Alan.
This was my first time in the chat room, watching the maps and pictures come in as they are received. Amazing job Dave!
Hi Guys,
I want to congratulate you with both succesfull flights! 🙂
According to the latest telemetry data of SNOW it should have landed a few of miles from my QTH, When it was off the map, I jumped into the car and drove to the latest telemetry coordinates.. took out my FT-817 and tried if i could hear SNOW again..
No signal received whatsoever, an hour later a friend of my called me he heard some very hard signals on .410.. His qth is approx 10 miles North-East to me.. right in the flight path of SNOW.. Maybe it did flew much further.
I did a search action the next day.. but for such a small plane its next to impossible to find it..
Neverteless Im really got intrested in this whole balooning adventure..
Dave.. hope you can contact me for more information how to setup a system like cloudy!
73′!
Bjorn – PD5DJ
Hi Dave,
Did you use ENERGIZER L91 Ultimate Lithium AA size batteries? They are rated for operating temperatures from -40 to 60°C, 3000mAh capacity and 2 amps continuous drain. They’re also much lighter than alkaline cells, weighing only 14.5 grams.
Yes. These and the AAA size are the only ones I use for HAB flights.
Regardless of what they are specified too, the combination of the cold (possibly below -40 on a long flight), plus partly used cells at that time, plus high current drain, was too much for them to maintain enough voltage for the Pi.
Dave,
Are you using a common power bank for Pi and Cutdown? If yes, what if they were separate ( yes a bit of extra weight but will eliminate risk to Pi and reboots ).
Best wishes for 2014 and many more flights!
Cheers
Rajnish
It’s not just the Pi rebooting on the 2nd and 3rd cutdowns – there wasn’t enough power available from the batteries to fire the 3rd cutdown. As a “floater”, this flight spent a lot more time at altitude than a normal flight does, allowing the batteries to get much colder, potentially below their -40C specification. What’s needed are some tests to determine the voltage and internal resistance of these batteries under these conditions – i.e. cold and partly depleted.
I had a great deal of fun attempting to track all the different payloads available on the day. It also gave me a few ideas for my own future launches. Well done.
I hope that Cloudy returns safely.
Happy New Year 2014!
Steve